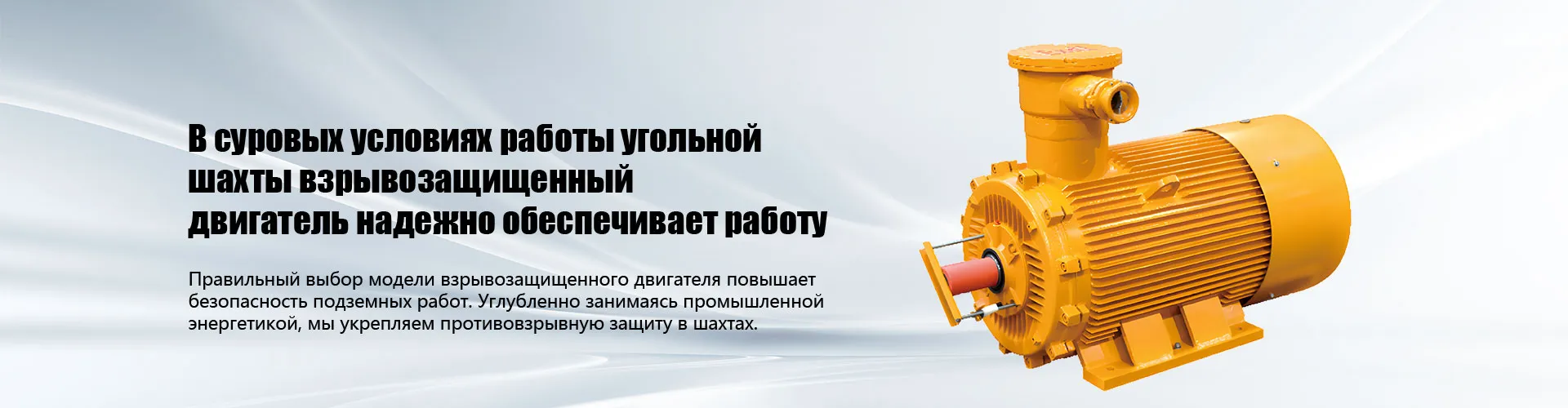
Управление тяговым электродвигателем
Когда слышишь 'управление тяговым электродвигателем', многие сразу думают про ШИМ, векторное управление, точные алгоритмы. На практике же часто упираешься в вещи куда прозаичнее — вроде перегрева подшипникового узла на длительном подъёме или странных вибраций, которые появляются только при определённой нагрузке и температуре окружающей среды. Это не та теория, что в учебниках. Тут начинается та самая 'кухня', где расчёты встречаются с реальным железом, и не всегда удачно.
От теории к 'железу': где теряется контроль
Взять, к примеру, стандартную задачу — поддержание момента. Всё красиво в модели, но на деле характеристики самого тягового электродвигателя 'плывут' от нагрева. Обмотка греется, сопротивление меняется — и вот уже заданный ток не гарантирует нужное усилие. Особенно это критично для крановых или подъёмных механизмов, где перегруз — это не просто потеря эффективности, а прямой риск. Я помню случай на одном из перегрузочных терминалов: двигатель вроде подобран правильно, а привод периодически уходил в ошибку по току. Оказалось, что термокомпенсация в частотном преобразователе была настроена по умолчанию, под 'среднестатистический' двигатель, а не под конкретную модель с её особенностями теплоотдачи.
Или другой аспект — коммутация. Казалось бы, современные IGBT-модули решают все проблемы. Но резкие фронты напряжения, которые они генерируют, — это испытание для изоляции старой обмотки. Не раз видел, как после установки нового 'продвинутого' преобразователя на старую технику начинались пробои. Управление — это не только дать команду, но и понять, как её исполнит конкретное 'железо' в конкретных условиях. Иногда приходится искусственно замедлять фронты, жертвуя быстродействием, но сохраняя ресурс.
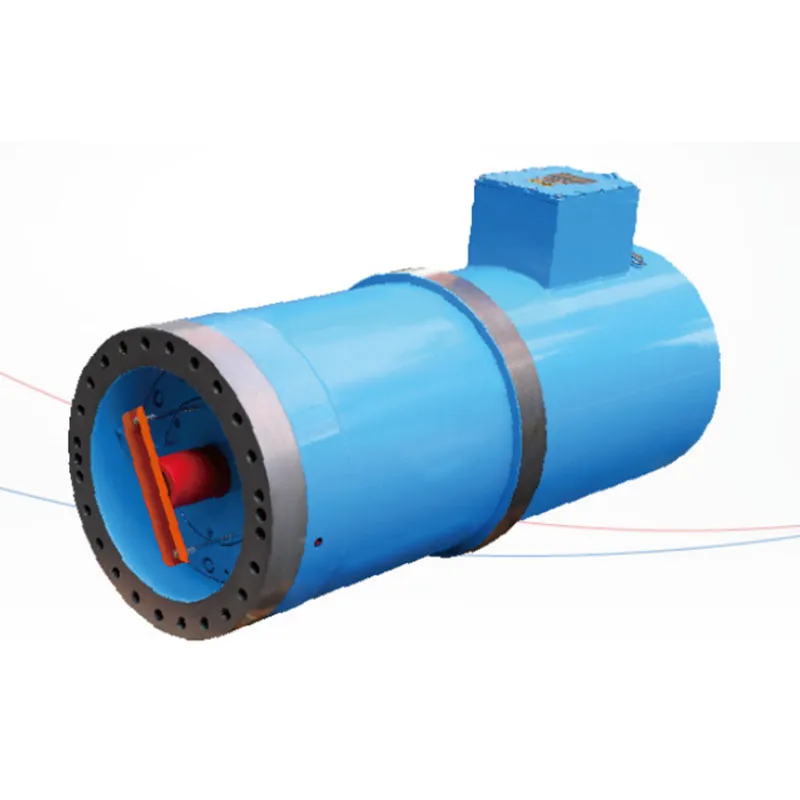
Тут как раз к месту вспомнить про специалистов, которые знают 'железо' изнутри. Вот, например, ООО Чанчжи Шэньтун Ремонт и Производство Взрывозащищенных Электродвигателей (сайт — https://www.stfbdj.ru). Это предприятие как раз из тех, что сталкивается с последствиями неидеального управления на практике. Они специализируются на ремонте взрывозащищённых электродвигателей, а это особая категория. Когда такой двигатель выходит из строя, часто причина кроется не только в износе, но и в том, как им управляли: был ли перегрев, работал ли он в нештатных режимах, выдерживались ли параметры пуска. Их работа — это, по сути, 'вскрытие', которое показывает все ошибки системы управления в прошлом.
Взрывозащита: дополнительный контекст для управления
Работа с взрывозащищёнными двигателями — это отдельный мир. Здесь управление тяговым электродвигателем обременено жёсткими рамками. Превысил допустимую температуру корпуса — и защита может не сработать, но риск возгорания или взрыва в опасной зоне возрастает катастрофически. Поэтому алгоритмы тут должны быть не просто эффективными, а 'осторожными'. Частотный пуск, например, — отличная штука для снижения механических нагрузок, но нужно досконально считать тепловыделение на низких частотах, чтобы не перегреть активную сталь и обмотку.
На одном из рудников была история: поставили систему рекуперативного торможения для экономии энергии. В теории — отлично. На практике — при интенсивном торможении двигатель, работающий в генераторном режиме, слишком сильно отдавал энергию в звено постоянного тока, что вызывало перегрев в местах соединения обмоток. Для обычного двигателя это, возможно, привело бы к ускоренному старению изоляции. Для взрывозащищённого же, который ремонтируют, к примеру, в упомянутом ООО Чанчжи Шэньтун, это могло стать причиной серьёзного инцидента. Пришлось пересматривать алгоритм, ограничивая ток рекуперации и добавляя активные тормозные резисторы. Управление стало менее 'экономичным', но безопасным.
Именно поэтому ремонтные предприятия такого профиля — не просто мастерские. Они становятся хранилищем практических знаний. Когда они восстанавливают двигатель, они видят последствия: где стёрлась изоляция из-за вибраций от гармоник, где подплавились контакты из-за частых пусков. Эта информация бесценна для инженеров, проектирующих системы управления. Фактически, их сайт stfbdj.ru — это не просто визитка, а потенциальный источник данных о 'болевых точках' эксплуатации.
Сенсорика и её недостатки: во что мы на самом деле верим
Основа любого управления — обратная связь. С тяговыми двигателями часто полагаются на датчики тока, энкодеры, температурные сенсоры. Но их показаниям можно верить лишь до определённой степени. Датчик тока может иметь дрейф, особенно в условиях сильных электромагнитных помех, характерных для тяговых приводов. Энкодер на валу забивается пылью или маслом (в шахтных условиях — обычное дело), и вот уже система 'не видит' реальную скорость, пытаясь компенсировать мнимую ошибку рывками тока.
Приходится строить систему с избыточностью и взаимной проверкой данных. Например, оценивать температуру не только по датчику в обмотке (который может отклеиться), но и по термистору на корпусе и косвенно — по тепловой модели, учитывающей ток и частоту. Если показания начинают расходиться сверх допустимого порога — переходить в аварийный режим, сигнализировать оператору. Это уже не просто управление, это диагностика в реальном времени. И такие решения рождаются не в идеальных лабораториях, а после анализа поломок, с которыми сталкиваются ремонтники.
К слову, при ремонте на предприятиях вроде ООО Чанчжи Шэньтун Ремонт и Производство Взрывозащищенных Электродвигателей часто обнаруживается, что штатные датчики температуры были неисправны или вообще отсутствовали, хотя по паспорту должны быть. И двигатель работал 'вслепую', пока не вышел из строя. После такого ремонта часто рекомендуют не просто восстановить обмотку, а модернизировать систему мониторинга, установить дополнительные точки контроля. Это уже следующий уровень — когда управление и техническое обслуживание становятся частью единого цикла.
Программируемая логика: гибкость vs. надёжность
Современные контроллеры позволяют реализовать практически любую логику управления тяговым электродвигателем. Но здесь кроется другая ловушка — чрезмерная сложность. Слишком 'умный' алгоритм, напичканный десятками условий и поправочных коэффициентов, становится чёрным ящиком. Когда что-то идёт не так (а это всегда случается), разобраться в причине почти невозможно. Особенно если программировал один человек, а обслуживает — другой.
Выработал для себя правило: основная, базовая логика управления должна быть максимально простой, прозрачной и надёжной. Все адаптивные функции, компенсации, оптимизации — это дополнительные слои, которые можно при необходимости отключить. На одном проекте пришлось переписывать программу для привода шахтной лебёдки именно из-за этого. Предыдущий разработчик сделал гениальную, с его точки зрения, систему адаптации к изменению веса груза. Но при сбое датчика натяжения каната алгоритм начинал 'дергать' двигатель, создавая опасные динамические нагрузки. Упростили до классической двухконтурной системы (ток-скорость) с жёсткими ограничениями. Надёжность возросла на порядок.
При этом нельзя скатываться в примитивизм. Та же тепловая модель двигателя — вещь необходимая. Но её константы должны быть не абстрактными, а взятыми из реальных испытаний или паспортных данных конкретного двигателя. Иногда полезно запросить эти данные у производителя или, если двигатель проходил капремонт, у предприятия-ремонтника. У того же ООО Чанчжи Шэньтун, вероятно, накапливаются фактические тепловые характеристики двигателей после перемотки — это ценные сведения для более точной настройки защиты.
Интеграция в систему: когда двигатель — не единственный элемент
Наконец, ключевой момент, который часто упускают из виду. Тяговый электродвигатель почти никогда не работает сам по себе. Он связан с механической передачей (редуктором, муфтой), с питающей сетью, с системой охлаждения, с вышестоящим АСУ ТП. И проблемы могут приходить оттуда. Неправильно подобранный редуктор с люфтом может вызывать колебания момента, которые система управления будет пытаться подавить, перегружая силовые ключи. Падение напряжения в сети может привести к сбою в алгоритме переключения обмоток.
Реальный пример: на конвейерной линии двигатель управлялся идеально, но постоянно срабатывала защита от перегрузки. Оказалось, проблема была в изношенной муфте, которая создавала переменное тормозное усилие. Система управления, пытаясь поддерживать заданную скорость, бешено меняла ток, но причину устранить не могла. Пришлось спускаться на уровень механики. Поэтому грамотное управление начинается с комплексной диагностики всей кинематической цепи, а не только электрической части.
В этом контексте ремонтное предприятие — последнее звено, которое видит совокупный результат работы всей системы. Когда к ним привозят двигатель с оплавленными обмотками, они могут (и должны) задавать вопросы: а что привело к такому перегреву? Как работала система охлаждения? Не было ли заклинивания в механике? Их заключение после ремонта — это важный сигнал для службы эксплуатации и для проектировщиков системы управления. Сайт https://www.stfbdj.ru в идеале должен быть не только точкой приёма заказов, но и местом, где обобщается такой опыт, публикуются технические заметки о типовых неисправностях и их связях с режимами работы привода.
Вместо заключения: постоянный диалог с железом
Так что, возвращаясь к началу. Управление тяговым электродвигателем — это не разовая настройка 'по книжке'. Это процесс, диалог. Ты задаёшь команды, а 'железо' отвечает тебе током, температурой, вибрацией. И нужно уметь слушать эти ответы, часто неочевидные. Нужно смириться с тем, что идеальных моделей нет, есть лишь более или менее точные приближения. И что иногда самое важное знание приходит не от поставщика частотного преобразователя, а от бригады ремонтников, которая вскрыла сотни двигателей и видела изнанку их работы.
Поэтому для инженера, занимающегося приводами, было бы полезно иногда оторваться от экрана с осциллограммами и съездить на ремонтный завод. Посмотреть, как разбирают двигатель, какие следы оставляют на нём те самые алгоритмы, которые ты писал. Увидеть последствия ошибки в настройке ограничения тока или в расчёте времени разгона. Это та самая 'обратная связь', которая делает управление по-настоящему эффективным и, что главное, безопасным. И компании, которые, как ООО Чанчжи Шэньтун, находятся на этой стороне процесса, — незаменимые партнёры в этом диалоге между теорией и практикой.
Соответствующая продукция
Соответствующая продукция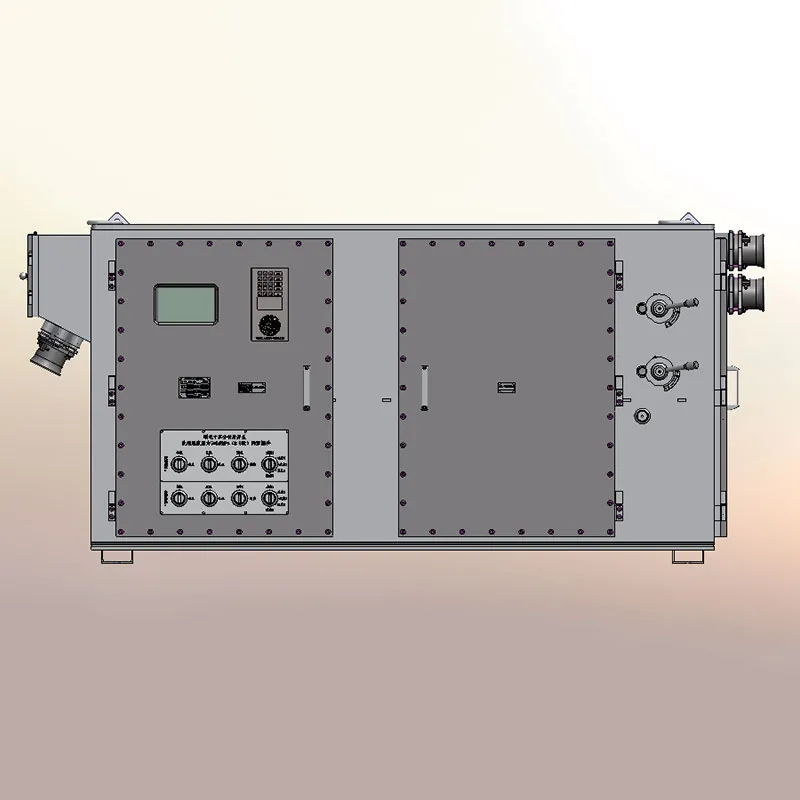



Самые продаваемые продукты
Самые продаваемые продукты-
 Взрывозащищенные трехфазные асинхронные двигатели для подземных угольных шахт серии YBK3
Взрывозащищенные трехфазные асинхронные двигатели для подземных угольных шахт серии YBK3 -
 Серия пускателей: взрывозащищенные и искробезопасные (реверсивные) вакуумные электромагнитные пускатели для шахт
Серия пускателей: взрывозащищенные и искробезопасные (реверсивные) вакуумные электромагнитные пускатели для шахт -
 Взрывозащищенный и искробезопасный двигатель с частотным регулированием скорости для шахт серии YJVFT
Взрывозащищенный и искробезопасный двигатель с частотным регулированием скорости для шахт серии YJVFT -
 Асинхронные трехфазные электродвигатели для печей серии LY
Асинхронные трехфазные электродвигатели для печей серии LY -
 Серия монорельсовых локомотивов Взрывозащищенный дизельный монорельсовый локомотив
Серия монорельсовых локомотивов Взрывозащищенный дизельный монорельсовый локомотив -
 Взрывозащищенные трехфазные асинхронные двигатели для конвейеров серии YBSS
Взрывозащищенные трехфазные асинхронные двигатели для конвейеров серии YBSS -
 Взрывозащищенные трехфазные асинхронные двигатели для конвейеров серии YBS
Взрывозащищенные трехфазные асинхронные двигатели для конвейеров серии YBS -
 Серия устройств плавного пуска: взрывозащищенные и искробезопасные низковольтные вакуумные устройства плавного пуска переменного тока для шахт
Серия устройств плавного пуска: взрывозащищенные и искробезопасные низковольтные вакуумные устройства плавного пуска переменного тока для шахт -
 Серия высоковольтных/низковольтных головок: Взрывозащищенный низковольтный защитный ящик для передвижных подстанций в шахтах
Серия высоковольтных/низковольтных головок: Взрывозащищенный низковольтный защитный ящик для передвижных подстанций в шахтах -
 Взрывозащищенные иискробезопасные шахтные синхронные электродвигатели с постоянными магнитами и частотным регулированием скорости серии TYJVFT
Взрывозащищенные иискробезопасные шахтные синхронные электродвигатели с постоянными магнитами и частотным регулированием скорости серии TYJVFT -
 Серия центров нагрузки Взрывозащищенный и искробезопасный силовой центр для шахт (передвижная подстанция)
Серия центров нагрузки Взрывозащищенный и искробезопасный силовой центр для шахт (передвижная подстанция) -
 Взрывозащищенные трехфазные асинхронные двигатели для проходческих комбайнов серии YBUD
Взрывозащищенные трехфазные асинхронные двигатели для проходческих комбайнов серии YBUD
Связанный поиск
Связанный поиск- Электрическая схема асинхронного электродвигателя
- Электродвигатели асинхронные конденсаторные
- Классификация электрических двигателей
- Электродвигатель постоянного тока с постоянным магнитом
- Горячий двигатель электрический
- Электрический двигатель элементы
- Периодичность осмотра взрывозащищенного электрооборудования
- Электрические двигатели постоянного и переменного тока
- Схема электродвигателя с постоянным магнитом
- Магнитный пускатель 12 вольт



